.. a related topic ..
What ugly acronyms, even mixed languages: IMU – inertial measuring unit; TEK – Total Energie Kompensation.
Since we have IMU’s available on the consumer market the discussion on variometer compensation gained new speed. The projects and solutions to have a complete physical model of glider motion and the motion of the surrounding air in the cockpit became more an more popular and also valuable for practical use.
Nevertheless putting sophisticated sensors into your glieder also raises the need for a reference calibration, otherwise they won’t be much of a help.
Being fan of new technology specifically when deployed in a simple and pragmatic fashion that makes the goods available to everybody let my think about the reference calibration of an IMU built into a glider.
Those IMU’s tend to be picky in some ways. It needs a good intrinsic as well as extrinsic calibration to get the most out of them. Some parameters you collect on the go, proper filtering might be a challenge. When ever the physical reference of a sensor is of relevance the designer and factory shipping your new toy is out of scope. You need to install the sensor properly and make it knowing it’s reference.
I haven’t read about a good reference calibration for IMU’s built into a glider. What I have heard did not convince me. I never saw a pilot rolling his glider over the apron to get the new IMU toy calibrated. Yes, that would be rather unpractical.
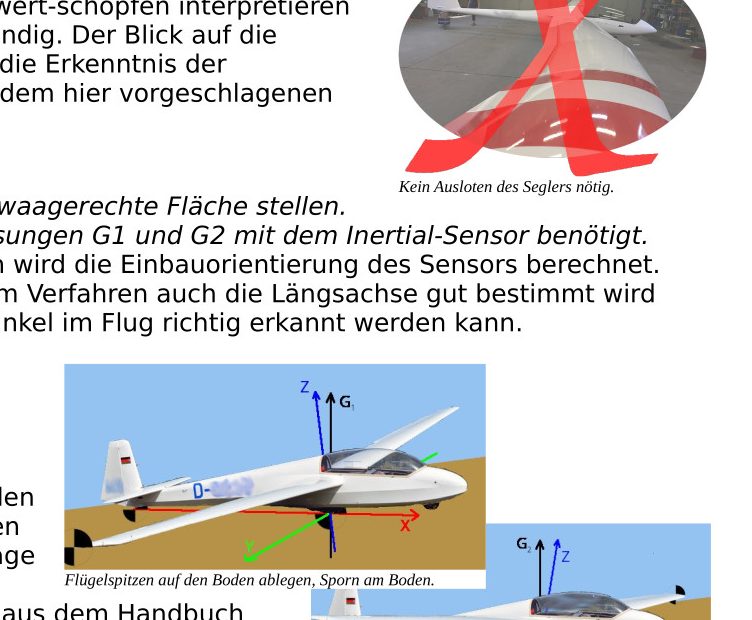
All this lead to the proposed method. The paper describes the procedure to capture the reference axes of a to the glider fixed IMU. With that the IMU will sense angle of attack, crab angles and gyros correctly and finally wind and vario compensation is going to be a thrill.
Here the original paper. You find an implementation of this method including a basic accelerometer bias detection on github XCVario file main/KalmanMPU6050.cpp: 357ff.